DJI Matrice 4E and Open-Source Software Used to Survey 130 Hectares and Identify 29 Native Plant Species
Surveyor Pablo Carranza used a DJI Matrice 4E drone paired with free open-source software WebODM to identify, classify, and geolocate 29 native plant species across 130 hectares, demonstrating that an effective machine learning model can be built with just 300 training samples for low-cost environmental baseline surveys.
Highlights
- Pablo Carranza used a DJI Matrice 4E at 45m altitude to map 130 hectares and identify 29 native plant species in Argentina's Espinal region.
- The supervised ML model required only about 300 training samples, far fewer than the commonly cited 100,000, but is site-specific and not transferable without new fieldwork.
- The entire processing workflow used free open-source tools — WebODM Lightning and Python — with no commercial photogrammetry software.
- A biologist's on-site fieldwork and species catalog were essential ground-truth inputs before any automated classification could begin.
- The Matrice 4E's onboard compute unit and DJI's model-training tools could enable real-time airborne classification with a future firmware update.
Drone Plus Open-Source Tools Complete Large-Scale Plant Census
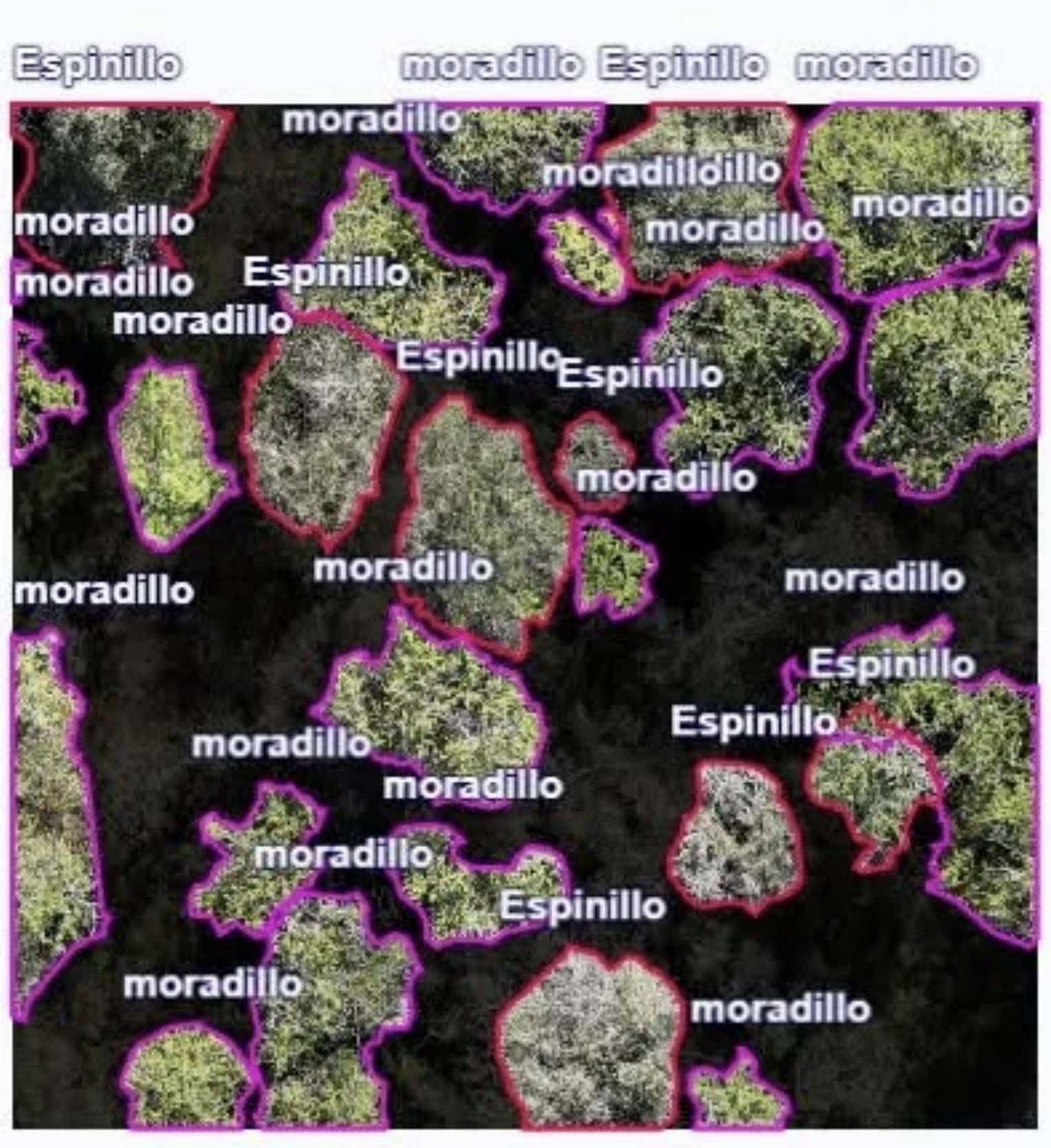
A surveyor has used a DJI Matrice 4E drone and free open-source software to successfully identify, classify, and precisely geolocate every individual of 29 native plant species across a 130-hectare survey area. Pablo Carranza shared the results in the "Drone Mapping and Processing" community, posting annotated orthomosaics showing hundreds of tree canopies individually outlined and labeled by species name, each tied to coordinate data.
Flight Setup: Why the Matrice 4E
Carranza set the Matrice 4E's flight altitude at 45 meters (148 feet) — quite low for a mapping mission. He specifically explained that he chose the 4E over the lower-priced Matrice 4T because the 4T's camera specifications were not up to the task.
From a hardware standpoint, the reasoning checks out. The Matrice 4E features a 4/3-inch CMOS, 20-megapixel wide-angle camera equipped with a mechanical shutter designed specifically for mapping. The 4T's wide-angle camera, by contrast, uses a smaller 1/1.3-inch sensor and is tuned primarily for public safety applications where thermal imaging takes priority.
The post attracted 87 likes and 29 comments within a day, with biologists, farmers, and surveyors all asking how the species identification actually works. The answer is a combination of fieldwork, machine learning, and a deliberately lean training set.
Biologist Builds Ground Truth First, Then the Drone Does the Counting
Species identification was not accomplished from aerial imagery alone. A biologist visited the site in person, surveyed the local flora, collected physical samples, and compiled a catalog covering 29 species. This ground-truth catalog became the labeled training data for a supervised machine learning model, which then classified individual plants visible in the drone imagery.
Carranza noted that the field survey was indispensable because the team was unfamiliar with the local vegetation. This detail matters more than it sounds. Two species visible in his annotated orthomosaics — Espinillo (Vachellia caven) and Moradillo (Schinus fasciculatus) — along with Spanish-language discussion in the comments, indicate the work was conducted in the Espinal shrubland region of South America, most likely Argentina. This is arid, xerophytic terrain where canopies overlap and many species present a similar grey-green tone from above. A model trained on plant data from another region would produce nothing more than guesswork.
When a community member repeated the common claim that "AI plant identification requires 100,000 images," Carranza pushed back with practical experience: 100,000 plants is far too many for training — roughly 300 samples are enough to produce stable results, provided environmental variation is limited. That caveat is the crux of vegetation classification: a model calibrated for a specific site's lighting, phenology, and species composition may not transfer to the next valley over.
The Entire Workflow Runs on Free, Open-Source Tools
Carranza processed the drone photos using WebODM Lightning, the cloud-hosted version of the open-source photogrammetry engine OpenDroneMap. He then used Python-based image tiling to crop the orthomosaic while preserving its geolocation data. The choice is notable — this is a professional-grade deliverable built entirely on a free toolchain, bypassing Pix4D, DroneDeploy, or DJI Terra.
Because the orthomosaic is georeferenced, every classified plant can be located by its centroid coordinates. This single step is what transforms a "pretty map" into a "usable dataset." Once every individual has a position, spatial relationships between plants and between species become quantifiable: clustering, spacing, dominance, and distribution across 130 hectares. Carranza stated that geolocation is what makes it possible to study inter-individual and inter-species relationships — the core purpose of an environmental impact baseline survey.
He was also candid about suboptimal flight conditions. The day was sunny, and the shadows cast by sunlight interfered with canopy segmentation. He noted that overcast, windless conditions would have been ideal. Anyone who has tried mapping canopies under harsh afternoon light knows the problem: shadow edges get interpreted as object edges, and the model must learn to ignore them.
Onboard AI Is Coming to the Same Airframe
The Matrice 4E that Carranza used already ships with built-in AI detection models. DJI also offers model training tools and a third-party developer certification pathway that allows custom models to run on the drone's onboard compute unit. His current workflow keeps the intelligence on the ground, processing through WebODM and Python after the flight. But the hardware he is already using may be just one firmware update away from performing some classification tasks in the air in real time.
This aligns with DJI's broader enterprise product trajectory — the company has been pushing onboard autonomy and AI capabilities down to more affordable airframes via the Manifold 3 compute module and obstacle-sensing accessories, rather than reserving them solely for dock-deployed systems. The compute power needed to identify a plant in flight is no longer the bottleneck; the labeled training data from a ground-based biologist is.
Editorial Analysis
The most compelling detail of this project is precisely the one most AI-mapping demos omit: a human biologist physically visited the site, collected samples, and built a catalog before the model ever touched the imagery. This is supervised learning done correctly, and it is the difference between a classifier that holds up in an environmental report and one that amounts to fancy guessing.
The cost structure deserves the most attention. Carranza used a mapping drone in the roughly $5,000 price class, a free photogrammetry engine, and a single field survey to complete the entire project. By comparison, a project that used a Matrice 400 and Zenmuse L3 to map lost Maya cities in Guatemala carried a scanning budget in the seven figures. Two vastly different budget scales, but the same core logic: replacing conjecture with georeferenced datasets.
The honest limitation is one Carranza himself flagged: his 300-sample model works only when "environmental variation is limited." This is a real constraint, not a footnote. It means this is a site-specific tool, not a universal species classifier, and fieldwork must be repeated at every new site. Whether DJI's onboard model-training tools can eventually reduce the fieldwork step, or whether the biologist's ground catalog remains an irreplaceable input, is the open question projects like this keep raising. For now, the drone can only identify what the biologist teaches it to see.
原文來源: 查看原文
FAQ
Newsletter
Subscribe to our Low-Altitude Industry Newsletter
Daily curated news on low-altitude economy and drone industry, delivered to your inbox.
Reviewed and published by the LAETimes editorial desk ·