東京大學研發DRAGON變形無人機 自主穿越狹縫瞄準福島核廠除役
東京大學JSK實驗室公開展示DRAGON v1.5無人機,這款具八組獨立導管風扇的形變飛行機器人能在空中自主變形,穿越狹窄環境無需外部定位輔助。研究主持人趙默舉博士透露,團隊已納入福島第一核電廠除役計畫,目標讓機器人代替人類進入高輻射危險區域。原型機面臨的主要挑戰為電池續航與環境耐用性,但團隊對技術進展持樂觀態度。
東京大學JSK實驗室展示DRAGON v1.5無人機,具備八組可獨立調向的導管風扇,能在空中自主變形穿越狹窄環境,已納入福島第一核電廠除役計畫,預期替代人工進入高輻射危險區域。
重點速覽
- DRAGON v1.5搭載四節可動關節及八具萬向架導管風扇,可自主變形穿越固定翼無人機無法通過的狹縫
- 全球首款僅依賴機載LiDAR、IMU、編碼器實現完全自主飛行與變形的空中機器人,無需外部定位系統
- 研究團隊正積極推進災難救援應用,並參與日本福島核廠除役國家重大計畫
- 趙默舉博士坦言電池續航與惡劣環境耐用性是實戰部署最大挑戰,但技術正穩步改善
- 形變無人機設計突破傳統四軸機剛性外形限制,重心與推力動態平衡需機載運算高速處理
文章重點
- 東京大學JSK實驗室在駒場校區展示DRAGON v1.5,這是全球首款能全自主飛行並重新構形的形變空中機器人,僅靠機載3D LiDAR、IMU與關節編碼器運作。
- DRAGON由四節可動關節與八具萬向架導管風扇組成,原版於2018年首次亮相,v1.5版本實現完全自主變形飛行。
- 研究主持人趙默舉博士確認DRAGON已加入福島第一核電廠除役國家計畫,目標是取代人類進入輻射危險區域作業。
- 最大部署障礙為機載電池續航時間不足與惡劣環境耐用性問題,趙博士表示隨硬體軟體進步,這兩項挑戰可望逐步克服。
- DRAGON的形變能力讓它可穿越比自身伸展長度更窄的縫隙,應用場景鎖定地震瓦礫等人員與剛性無人機均無法進入的受困空間。
蛇形機器人首次亮相 具備全自主變形能力
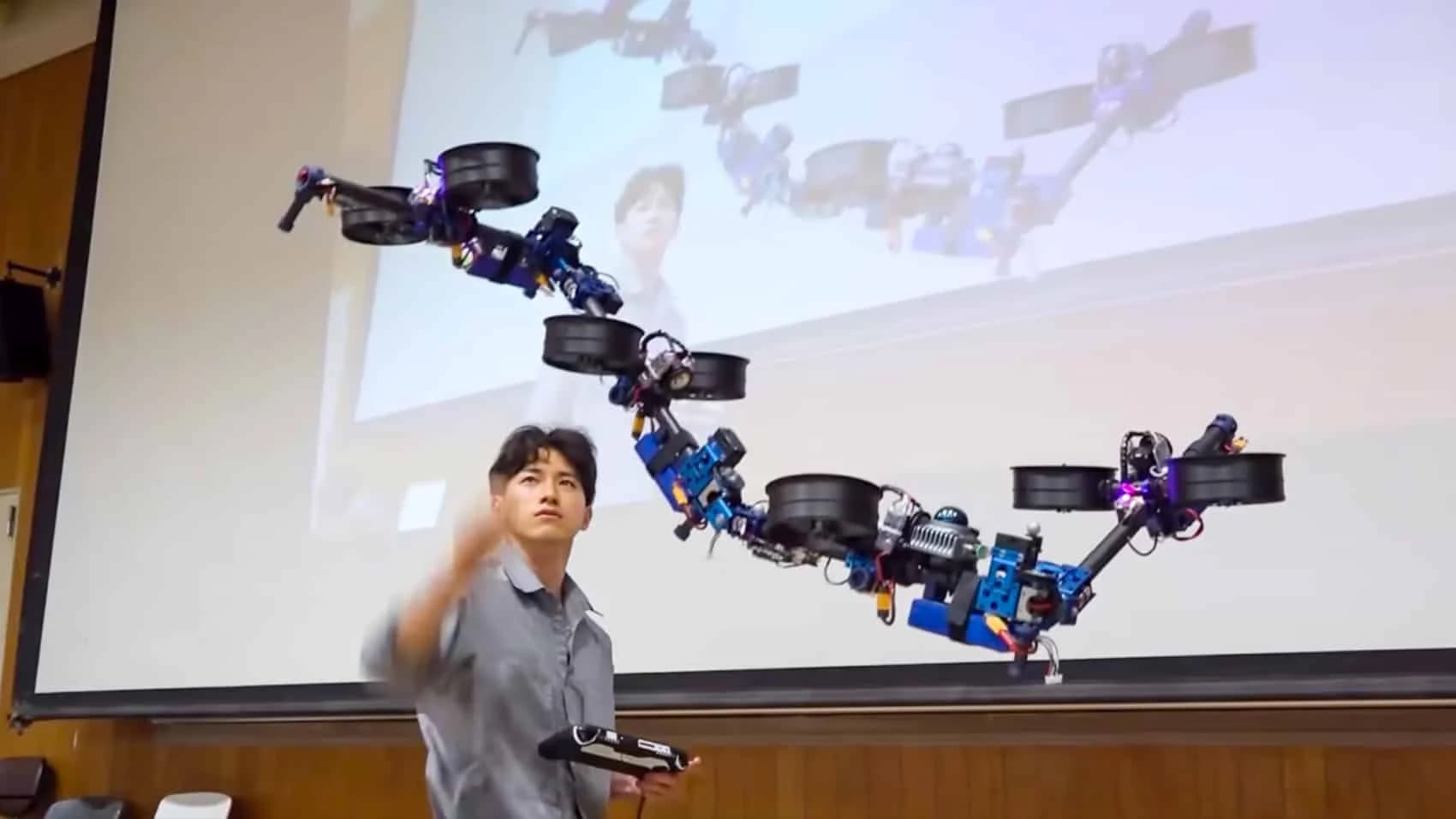
東京大學JSK實驗室日前在駒場校區舉行現場展示,讓DRAGON v1.5無人機正式公開亮相。這款可在空中自主變形的飛行機器人,能彎曲、捲縮身體,穿越一般固定機架無人機無法通過的狹窄縫隙,全程僅依賴機載感測器自主完成,無需外部定位系統輔助。
計畫主持人趙默舉博士(Dr. Moju Zhao)向媒體透露,下一步目標涵蓋災難救援現場,乃至最終投入日本受損的福島核電廠除役作業。
八組獨立推力系統實現靈活飛控
DRAGON由四節可動關節首尾相連組成,形如飛行中的蛇。每節關節配備兩具安裝於萬向架上的導管風扇,整體共有八個可獨立調向的推力點,遠比一般多旋翼無人機的四具固定旋翼靈活得多。
原版DRAGON於2018年首次發表,其縮寫正體現了設計目標:Dual-rotor embedded multilink Robot with the Ability of multi-deGree-of-freedom aerial transformatiON(具多自由度空中變形能力的雙旋翼嵌入式多連桿機器人)。由於每具風扇皆可獨立旋轉,無人機在幾乎任何姿態下都能維持穩定飛行。
它可伸展成一條直線穿越狹縫,也可捲縮成更緊湊的形狀,萬向架風扇同步重新調整推力方向,確保變形過程中不失控。一般多旋翼無人機只有一種固定外形;DRAGON則將外形視為可在飛行中隨時改變的參數,這正是它能穿越比自身伸展長度更窄縫隙的關鍵。
機載感測器自主融合處理環境資訊
此次駒場展示最受矚目的成就,在於完全自主運作能力。實驗室表示,DRAGON v1.5是全球首款能夠完全自主飛行並重新構形的形變空中機器人,僅憑機身上的感測器即可完成所有操作。機載LiDAR負責掃描環境空間,IMU慣性測量單元追蹤運動狀態,關節編碼器則即時回報每節關節的角度數據。機載電腦將所有資訊融合處理,全程無需外部追蹤系統。
這項技術挑戰遠比想像中困難。每當一個關節彎曲,機器人的重心就會偏移,推力向量也隨之改變,控制系統必須以極快速度重新平衡並調整八具風扇的方向,以防止機體翻滾。僅靠機載運算實現這一點,正是研究團隊耗費多年突破的核心難題。
瞄準災難救援與核廠除役應用
趙博士向媒體說明DRAGON的應用方向:「在災難救援場景中部署此類機器人,是我們正在積極推進的方向之一,尤其考量到日本對此類技術有迫切需求。」他進一步點出設計背後的核心動機:「能夠抵達人類無法進入或過於危險的地點,是DRAGON最重要的研發動機之一。」
日本有充分的現實理由迫切需要這項技術。地震頻繁與老化基礎設施,正好創造出大量狹窄且危險的空間,而這正是形變無人機的用武之地。一台能折疊變薄穿越障礙、再展開繼續飛行的機器,與「要麼能進、要麼進不了」的剛性多旋翼無人機相比,是截然不同的工具。
趙博士並進一步透露,團隊已參與與福島第一核電廠除役相關的國家重大計畫。福島核廠除役工程是一項長達數十年的作業,目的是拆除因輻射而無法讓人員長時間停留的損毀反應爐設施。一台能夠改變形狀、在輻射污染的狹窄內部空間中穿梭的無人機,在此不只是一項新奇技術,更是讓人類遠離危險的重要手段。
電池續航與耐久性仍需克服
趙博士對於原型展示與實際部署之間的差距直言不諱:「真實世界部署最大的挑戰,是機載電池帶來的有限飛行時間,以及在惡劣環境中的耐用性。」
這兩項挑戰並非DRAGON獨有,但對這款複雜程度極高的機器人而言,影響更為嚴峻。八具導管風扇加上機載電腦耗電量可觀,直接限制無人機在崩塌現場或反應爐建築內的滯留時間。惡劣環境中的粉塵與輻射,也對需要精確維持關節運動的精密硬體造成嚴苛考驗。
儘管如此,趙博士仍持樂觀態度:「隨著硬體與軟體技術持續進步,這兩項挑戰都在穩步改善,我們相信最終能夠克服。」
對台灣業者的意義
DRAGON變形無人機的技術突破對台灣業者具有參考價值。國內從事基礎設施巡檢、搜索救援的無人機服務商,應密切關注東京大學在機載感測融合、自主飛控演算法的技術進展。若台灣廠商或研究機構能引進或自主開發類似技術,可大幅拓展應用於地震後廢墟搜救、老舊建築內部檢測等市場機會。同時,核能設施維護與除役作業若涉及高輻射環境,形變無人機的精密控制技術亦值得國內核工業界與政府評估引進或合作開發,以降低作業人員暴露風險。
常見問題
Newsletter
訂閱低空產業電子報
每日精選低空經濟與無人機產業新聞,直送您的信箱。
本文由 LAETimes 編輯部審核發佈 ·


