Tactile Learning Loop: How Human Touch Data Is Teaching Robots to Handle Eggs
ABB Robotics and prosthetics maker PSYONIC have announced a partnership that uses real-world tactile and pressure data collected from Ability Hand prosthetic users to train a robotic hand mounted on ABB's GoFa cobot arm. The collaboration aims to give industrial robots the delicate grip control needed to handle fragile, irregularly shaped objects such as eggs — a long-standing challenge for conventional automation systems.
Highlights
- ABB Robotics and PSYONIC have formally announced a partnership to develop human-like grip control for industrial robots using real-world prosthetic user data.
- Hundreds of Ability Hand prosthetic wearers generate authentic tactile, pressure, and grip adjustment data during daily activities, forming the core training dataset.
- ABB has mounted the Ability Hand directly on its GoFa cobot arm, leveraging identical hardware on both the human and robot sides to simplify behavior transfer.
- The Ability Hand's per-finger pressure sensors and haptic feedback system capture force magnitude and contact timing — data that traditional glove or VR training methods largely miss.
- ABB Robotics President Marc Segura identified robot dexterity as one of the hardest unsolved problems in industrial automation, calling this alliance a direct response to that challenge.
Tactile Learning Loop: How Human Touch Data Is Teaching Robots to Handle Eggs
For decades, engineers have watched industrial robots excel at repetitive tasks such as automated welding and pallet stacking. Yet the moment a task involves a fragile object whose shape varies slightly each time, those successes have proven difficult to replicate.
A single egg sitting in a carton is the quintessential test case for the limits of current technology. Too much grip force and the shell shatters; too little and the egg slips free. Subtle variations in shape, weight distribution, or surface texture are enough to confound robots that rely on fixed gripper configurations or basic vision systems.
To tackle this challenge, ABB Robotics and prosthetics company PSYONIC — developer of the Ability Hand bionic prosthetic — have formally announced a new partnership. The initiative draws from the real world, because laboratory models and pre-programmed demonstrations simply cannot capture what is needed here.
A Real-World Repository of Tactile Data
Hundreds of users currently wear the Ability Hand prosthetic in their daily lives. These active users continuously generate authentic tactile feedback, pressure variation, and grip adjustment data through everyday interactions. Whether washing dishes or rummaging through clothing, every movement accumulates rich sensor data.
Each finger of the Ability Hand incorporates pressure sensors and a full haptic feedback system. This setup tells users in real time both when contact occurs and how much force is being applied, allowing wearers to genuinely feel their grip rather than simply repositioning their hand.
For example, a user holding a mug and a raspberry simultaneously can use the system to calibrate their grip precisely — keeping the cup upright without crushing the delicate fruit.
Prosthetic users have also provided critical data when handling slippery objects, including force magnitude, finger placement, and movement speed in real-world conditions. By contrast, researchers have traditionally trained robots using specialized gloves, virtual reality rigs, or video recordings — methods that can capture final finger positions but largely fail to record force details and the authentic feel of different materials.
Prosthetic Data Feeds Directly into an Industrial Robotic Arm
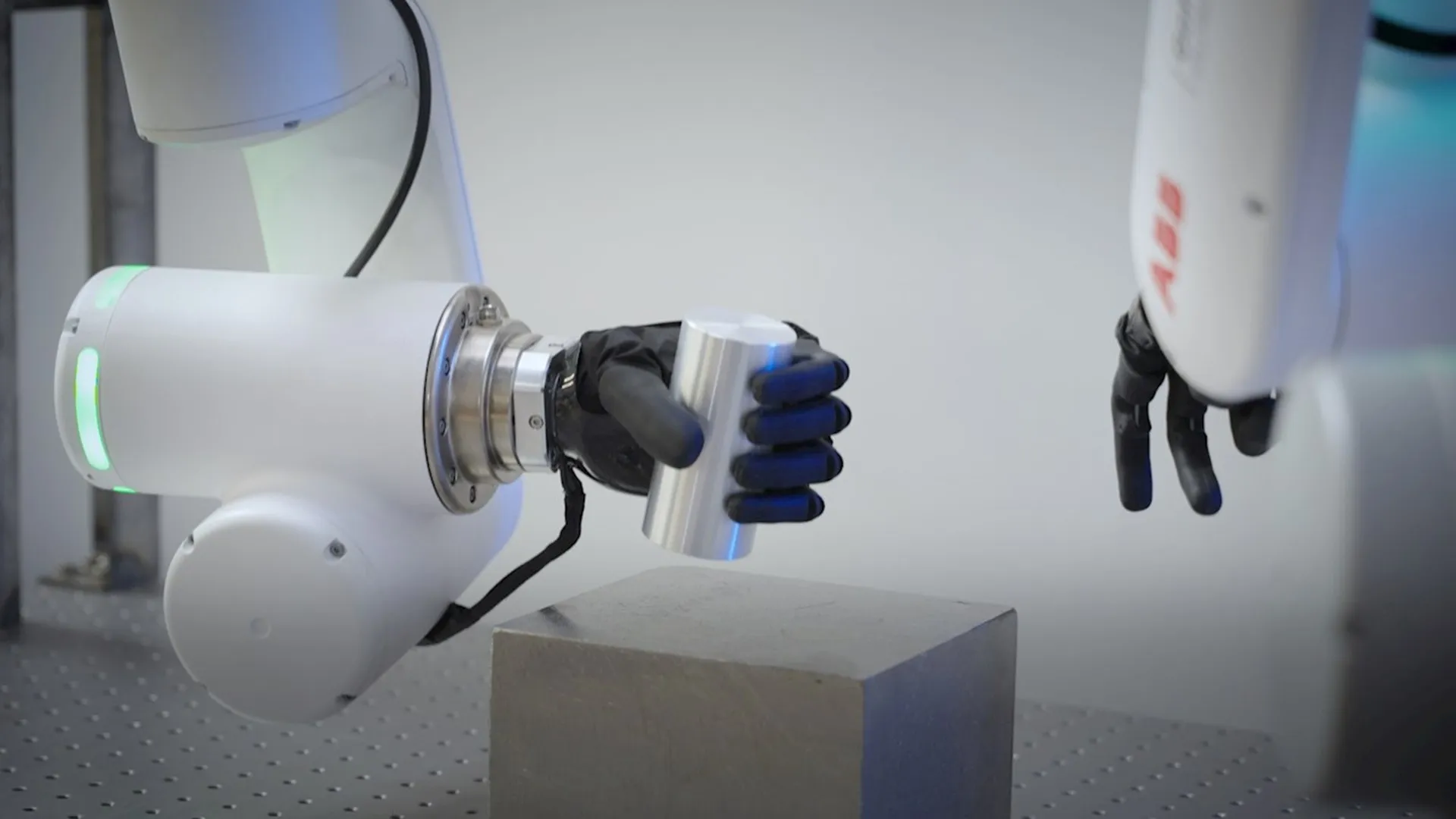
To bridge this gap, ABB has mounted an Ability Hand directly onto its GoFa collaborative robot arm for unlimited testing and refinement. The GoFa delivers industrial-grade precision and highly accurate force and position measurement, while all data aggregated from the human prosthetic side feeds back into the system to guide the behavior of the robotic version.
The key advantage of this collaboration lies in the fact that the human prosthetic and the robot end-effector share identical hardware. Because the hardware is the same, transferring learned behaviors from human to machine is a relatively straightforward process. Engineers can take knowledge captured from real interactions and integrate it directly into new control algorithms.
ABB Robotics President Marc Segura noted that giving robots human-like dexterity and an intuitive understanding of how to handle a wide range of objects has long been one of the most difficult challenges in industrial robotics — and that this alliance is designed to address it head-on.
Toward Autonomous Operation in Unpredictable Environments
This initiative forms part of a broader effort to build a new generation of intelligent machines capable of independently sensing, reasoning about, and manipulating objects. By moving beyond fixed, pre-programmed motion paths, the integrated solution aims to create systems with genuine real-world adaptability, enabling robots to operate with a higher degree of autonomy in dynamic and unpredictable environments.
原文來源: 查看原文
FAQ
Newsletter
Subscribe to our Low-Altitude Industry Newsletter
Daily curated news on low-altitude economy and drone industry, delivered to your inbox.
Reviewed and published by the LAETimes editorial desk ·