MIT and UPenn Researchers Develop MIGHTY System for Millisecond Obstacle Avoidance and Optimal Drone Path Planning
Researchers from MIT and the University of Pennsylvania have developed MIGHTY, an open-source trajectory planning system that uses Hermite spline mathematics to simultaneously optimize flight time and path. The system enables drones to react to obstacles in milliseconds, reaching destinations approximately 15% faster than state-of-the-art methods, and requires no expensive commercial software licenses — making it broadly applicable to disaster search and rescue, urban delivery, and industrial inspection.
Highlights
- MIT and University of Pennsylvania researchers developed MIGHTY, an open-source drone trajectory planning system that reacts to obstacles in milliseconds using Hermite spline mathematics.
- MIGHTY reaches destinations approximately 15% faster than current state-of-the-art methods and operates with about 90% of their computational overhead in simulation.
- In real-world flight tests, MIGHTY achieved speeds of 6.7 m/s and successfully avoided all obstacles encountered along its path.
- The system is fully open-source and requires no commercial software licenses, lowering the barrier to adoption for researchers, students, and companies worldwide.
- The research, published in IEEE Robotics and Automation Letters, was partially funded by the U.S. Army Research Laboratory and Singapore's Defence Science and Technology Agency.
In the aftermath of a catastrophic earthquake, UAVs could potentially fly into collapsed buildings to map the interior, delivering critical information that rescue teams need to reach survivors quickly. For autonomous robots, however, this remains an extremely challenging task — the system must maintain course while rapidly adjusting its trajectory to dodge unexpected obstacles.
A Single System That Tackles Two Challenges at Once
Researchers from MIT and the University of Pennsylvania have jointly developed a new trajectory planning system capable of addressing both challenges simultaneously. The technology allows drones to react to obstacles within milliseconds while maintaining a smooth flight path that minimizes overall flight time.
The system employs a novel mathematical formulation that ensures the robot reaches its destination safely along a feasible path, with lower computational overhead than existing approaches — enabling it to generate smoother trajectories faster than current state-of-the-art methods.
The trajectory planner is also computationally efficient enough to run in real time using only the robot's onboard computer and sensors, with no external processing required.
MIGHTY: Open-Source, Free, and License-Free
The system, named MIGHTY, is open-source and requires no commercial software packages that can cost hundreds of thousands of dollars, making it far easier to deploy across a wide range of real-world scenarios.
Beyond search and rescue, MIGHTY can be applied to last-mile urban delivery — where drones must dodge buildings, power lines, and pedestrians — as well as industrial inspection of complex structures such as wind turbines.
"MIGHTY achieves comparable or even better performance using only open-source tools, which means any researcher, student, or company in the world can use it for free," said Kota Kondo, lead author and MIT Aeronautics and Astronautics PhD student. "By removing that cost barrier, MIGHTY helps democratize high-performance trajectory planning and lays a foundation for a much broader community."
Co-authors include University of Pennsylvania PhD student Yuwei Wu and Professor Vijay Kumar, as well as corresponding author Jonathan P. How, Ford Professor of Aeronautics and Astronautics at MIT and director of the LIDS and ACL laboratories. The research was published in IEEE Robotics and Automation Letters.
Research Inspired by the Fukushima Nuclear Disaster
Kondo has acknowledged that his childhood experience of the 2011 Tōhoku earthquake and the subsequent Fukushima Daiichi nuclear accident was what drew him to autonomous robotics research. With school suspended, he watched daily news coverage of workers being exposed to high levels of radiation at the disaster site.
"That gave me the passion to build autonomous robots — ones that could enter these dynamic and dangerous environments, complete a mission, and report back to humans waiting safely elsewhere," Kondo said.
Breaking Free from the Fixed-Time Constraint
Many existing trajectory planning systems involve difficult trade-offs. Commercial systems can generate smooth trajectories quickly but come with steep licensing costs; open-source alternatives often fall short on performance or usability.
A common approach in traditional methods is to first estimate how long it will take a robot to travel from point A to point B, and then find the optimal path within that fixed time budget. While this generates trajectories quickly, it has a significant drawback: if a drone must take a wide detour around an obstacle, it may be forced to accelerate to meet the fixed time constraint, making it harder to handle sudden hazards.
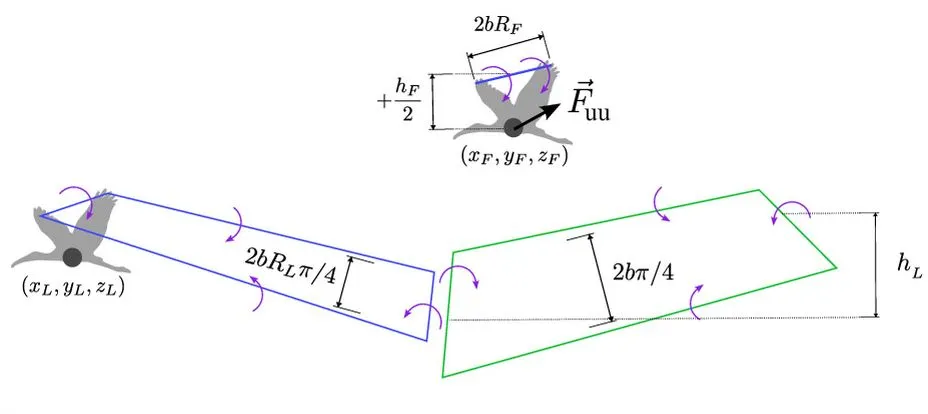
Hermite Splines: Joint Optimization of Time and Path
MIGHTY uses a mathematical technique called Hermite splines to simultaneously optimize flight time and flight path in a single step, producing smooth trajectories with precise control.
"Optimizing the spatial and temporal components together yields better results, but it makes the optimization problem more complex and harder to solve within an acceptable timeframe," Kondo explained.
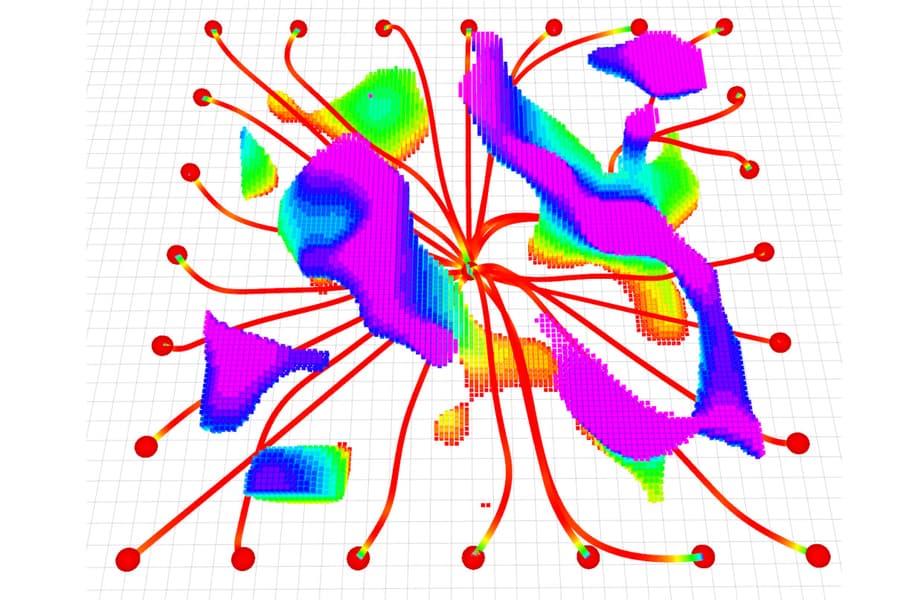
To reduce computational overhead, the team employed a key technique: rather than generating a trajectory from scratch each time, MIGHTY starts with an informed initial guess and refines it through iterative optimization, leveraging the scene map generated by the drone's LiDAR sensor.
"We can make a reasonable initial guess about what the trajectory should look like, which is much faster than generating the entire trajectory from nothing," Kondo said.
Performance: 15% Faster Than State-of-the-Art, 6.7 m/s in Real Flight
In simulation, MIGHTY required approximately 90% of the computation time needed by existing state-of-the-art methods, while reaching the destination safely about 15% faster.
In real-world robot tests, the system flew at 6.7 metres per second and successfully avoided all obstacles that appeared along its path.
"Everything in MIGHTY is integrated together — it doesn't need to communicate with any other software to arrive at a solution. That allows us to be even faster than some commercial solvers," Kondo said.
Future Directions
The research team plans to further develop MIGHTY to enable simultaneous control of multiple robots, conduct additional flight experiments in more complex environments, and continuously improve the open-source system based on community feedback.
Davide Scaramuzza, Professor and Director of the Robotics and Perception Group at the University of Zurich, who was not involved in the research, commented: "MIGHTY makes an important contribution to agile robot navigation by revisiting the trajectory representation itself. Hermite splines have already proven their value in visual simultaneous localization and mapping (SLAM), and it is exciting to see their benefits now extended to trajectory planning for mobile robots. By enabling joint optimization of path geometry, timing, velocity, and acceleration while preserving local control of the trajectory, MIGHTY gives robots greater freedom to compute fast, dynamically feasible motions in cluttered environments."
The research was partially funded by the U.S. Army Research Laboratory and the Defence Science and Technology Agency of Singapore.
原文來源: 查看原文
FAQ
Newsletter
Subscribe to our Low-Altitude Industry Newsletter
Daily curated news on low-altitude economy and drone industry, delivered to your inbox.
Reviewed and published by the LAETimes editorial desk ·