來源:Oscar Liang
原文連結 Betaflight 烏龜模式(Turtle Mode)設定教學:墜機翻覆後一鍵翻正
FPV 無人機墜機翻覆後還要走過去撿機?Betaflight 的烏龜模式(Turtle Mode)讓你只需撥動開關,就能讓四軸飛行器自動翻正,省時又方便。本文介紹完整設定步驟。
LAETimes 編輯部AI 輔助編譯・經編輯部審核 ·
5 個月前

文章重點
- 烏龜模式可讓 FPV 無人機墜機翻覆後一鍵翻正,免去手動撿機
- 需搭配 Betaflight 4.0 以上版本及支援反轉的 ESC 韌體使用
- 在 Betaflight Configurator 的 Modes 頁面指定輔助通道即可啟用
- 啟用時需先解鎖,再輕推搖桿搭配方向操控完成翻轉
- 是 FPV 競速與自由飛行玩家必備的實用功能
Betaflight 烏龜模式(Turtle Mode)完整設定教學
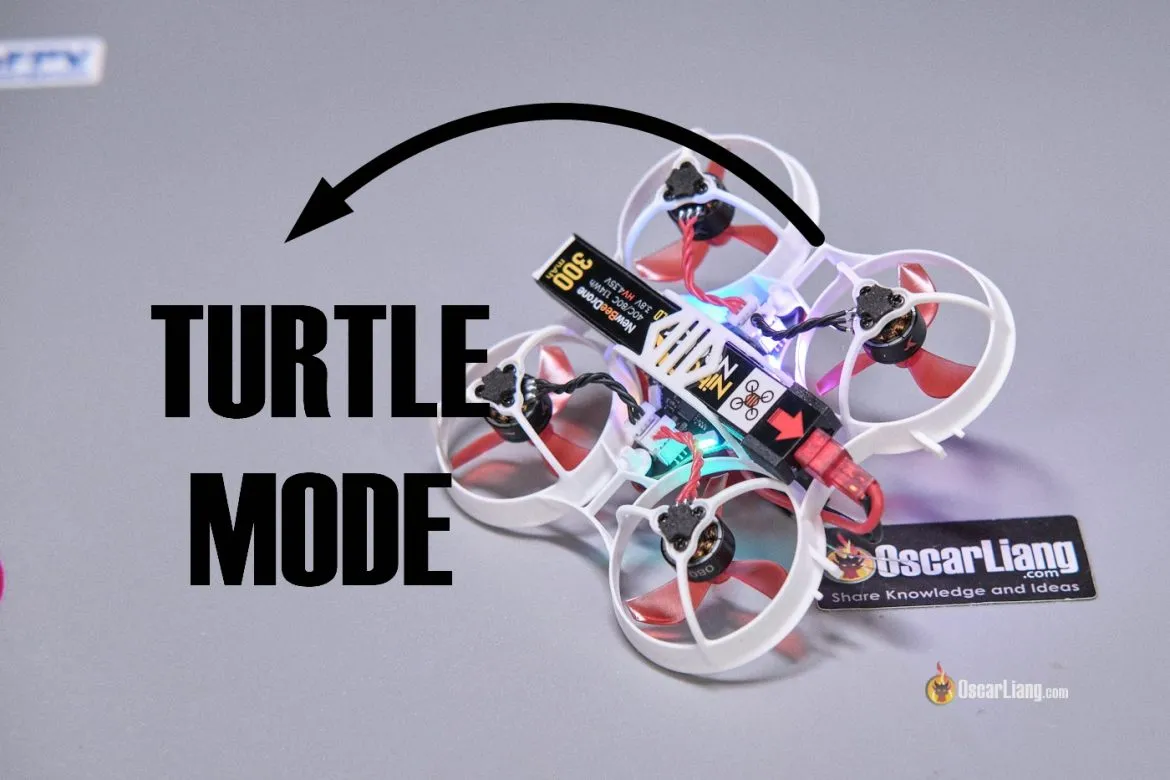
什麼是烏龜模式?
對於 FPV 競速或自由飛行的玩家來說,墜機翻覆幾乎是家常便飯。每次無人機翻過去倒扣在地上,你就得走過去手動把它翻正,這在比賽或練習時非常浪費時間。Betaflight 韌體中內建的「烏龜模式」(Turtle Mode),正式名稱為「Flip Over After Crash(墜機後翻轉)」,正是為了解決這個問題而設計的功能。
啟用烏龜模式後,只需在遙控器上撥動預設的開關,無人機就會反轉馬達旋轉方向,讓螺旋槳產生反向推力,將機體從倒扣狀態翻正,讓你不用離開操控位置就能繼續飛行。
設定前的準備
在開始設定之前,請確認以下條件:
- Betaflight 韌體版本:烏龜模式需要較新版本的 Betaflight 支援,建議使用 4.0 以上版本。
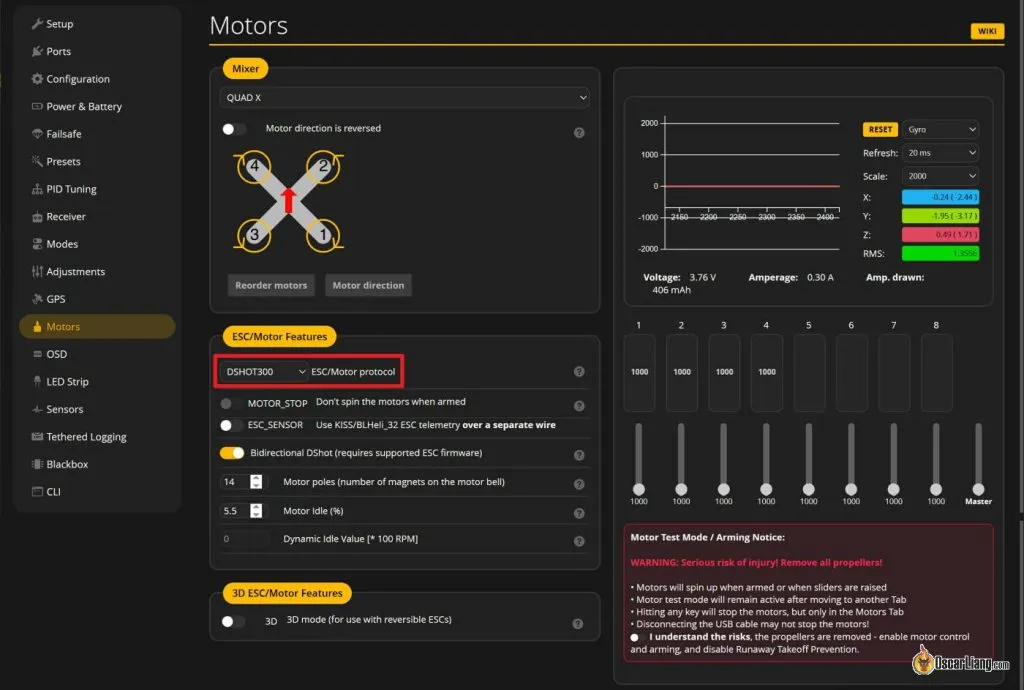
- ESC(電子變速器)韌體:ESC 必須支援反向旋轉功能,建議使用 BLHeli_S 或 BLHeli_32 韌體,並確認已啟用雙向 DShot(Bidirectional DShot)功能。
- Betaflight Configurator:請安裝最新版本的 Betaflight 設定工具。
設定步驟
- 將無人機連接電腦,開啟 Betaflight Configurator。
- 進入 「Modes(模式)」 頁面。
- 找到 「FLIP OVER AFTER CRASH」 選項。
- 為此模式指定一個 遙控器上的輔助通道(AUX Channel) 與對應的開關位置。
- 確認 ESC 韌體已啟用 反向旋轉 功能。
- 儲存設定後,進行地面測試:先解鎖(Arm),再觸發烏龜模式,輕推搖桿確認馬達是否反向轉動。
使用注意事項
- 烏龜模式僅在無人機解鎖狀態下才能觸發。
- 啟用時請輕推油門搖桿,並搭配滾轉或俯仰方向操控,讓機體順利翻正。
- 如果無人機卡在草叢或障礙物中,烏龜模式可能無法順利翻轉,仍需手動取回。
- 使用前請務必在安全環境中測試,確保功能正常運作。
結語
烏龜模式是 FPV 飛手必備的實用功能之一,尤其在練習場地或比賽中,能大幅減少撿機的時間與麻煩。如果你還沒設定過,強烈建議花幾分鐘完成設定,讓你的飛行體驗更加順暢。
本文參考來源:Oscar Liang
原文來源: 查看原文


常見問題
Newsletter
訂閱低空產業電子報
每日精選低空經濟與無人機產業新聞,直送您的信箱。
本文由 LAETimes 編輯部審核發佈 ·